Quicklinks
| Programm-Download: | wedo-speed-governor.WeDo |
| Diese Seite als PDF: | wedo-speed-governor.pdf |
| Video: | Video auf Youtube |
Lego WeDo Fliehkraftregler
Der Fliehkraftregler ist eine mechanische Apparatur mit der die Geschwindigkeit einer Maschine gemessen und geregelt wird, indem die Drehgeschwindigkeit in eine Längsbewegung umgewandelt wird. Dieses Modell, gebaut und programmiert mit Lego WeDo, erläutert die Physik hinter dem Fliehkraftregler.
Video
Beschreibung
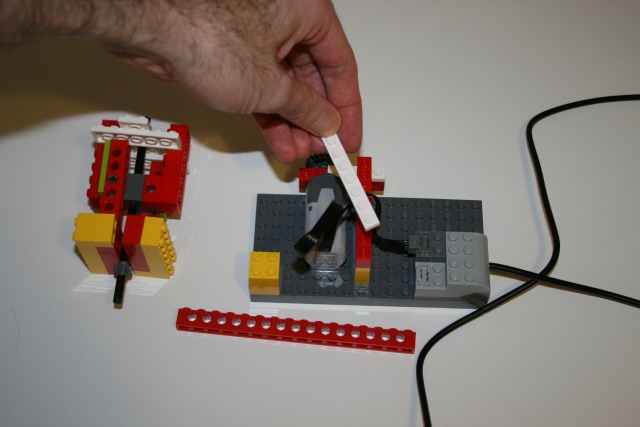
Zwei Gewichte (Gelbe und rote Klötze) werden an einer Drehachse wie ein Pendel befestigt. Je schneller sich die Achse dreht, desto grösser wird der Winkel zwischen den Gewichten und der Achse. Durch einen Mechanismus wird dieser Winkel in die horizontale Bewegung der weissen Plattform umgewandelt. Je schneller die Drehgeschwindigkeit, desto grösser der Winkel und desto tiefer kommt die Plattform zu liegen.
Die Plattform selber könnte nun z.B mit einer Drehklappe verbunden werden. Systeme wie dieses wurden seit dem 18th Jahhundert als „Tempomat“ für Dampfmaschinen verwendet. Dabei steuerte der Fliehkraftregler die Dampfzufuhr über eine Drosselklappe.
Das WeDo Programm

Das WeDo Programm für den Fliehkraftregler startet mit dem betätigen der „A“-Taste. Als erstes wird die Zahl 10 in der Bildschirmvariablen gespeichert und der Motor mit voller Geschwindigkeit („10“) gestartet.
Jetzt startet eine 10-Fache Schlaufe. Bei jedem Durchlauf wird, nach einer Wartezeit von 100, eins vom Wert der Bildschirmvariablen abgezogen und diese als neue Motorgeschwindigkeit festgelegt. Dadurch wird der Motor bei jedem Durchgang etwas langsamer, bis er schliesslich ganz stehen bleibt.
Die Physik des Fliehkraftreglers

Mit dem Zweiten newtonschen Gesetz erhalten wir in vertikaler Richtung:
T⋅cos(α)-m⋅g=0 → T=m⋅g/cos(α)
und horizontal: :
T⋅sin(α)=m⋅a → tan(α)=a/g
Die zentripetale Beschleunigung einer gleichförmigen Kreisbewegung ist:
a=r⋅ω2 → a=r1⋅sin(α)⋅ω2
Durch Kombination der letzten beiden Gleichungen erhält man:
cos(α)=g/(r1⋅ω2)
Und schliesslich kann die Höhenverschiebung der Plattform angegeben werden als:
d=r2⋅cos(α) → d=r2⋅g/(r1⋅ω2)
Da d nur Werte zwischen 0 und r2 annehmen kann, ergibt sich eine interessante Limitation für obige Gleichung:
ω≥√(g/r1)
Diese Einschränkung hatten wir schon in Gleichung 4: cos(α) existiert nur zwischen 0 und 1. Was für ω≥√(g/r1) der Fall ist.
Die physikalische interpretierung der Arbeitsbereich-Limite des Fliehkraftreglers
Die Zentrifugalkraft die benötigt wird um die Gewichte des Fliehkraftreglers nach in einem bestimmten Winkel α zu halten, ist: Freq=tan(α)⋅g⋅m
Die durch die Rotation erzeugte Fliehkraft beträgt allerdings nur: F=sin(α)⋅r1⋅ω2⋅m
Für ω kleiner als das untere Limit, reicht die produzierte Zentrifugalkraft nicht aus um die Arme des Fliehkraftreglers zu heben.
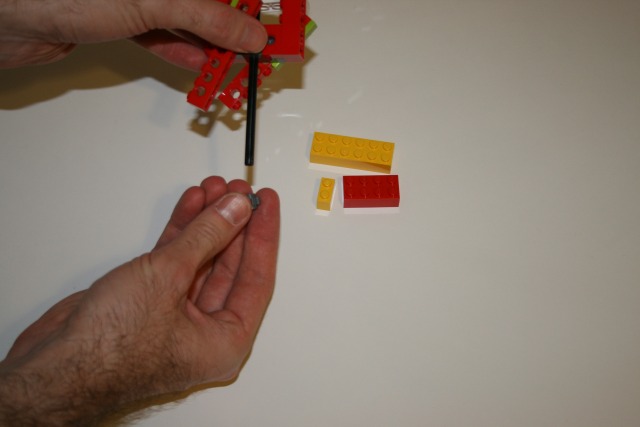
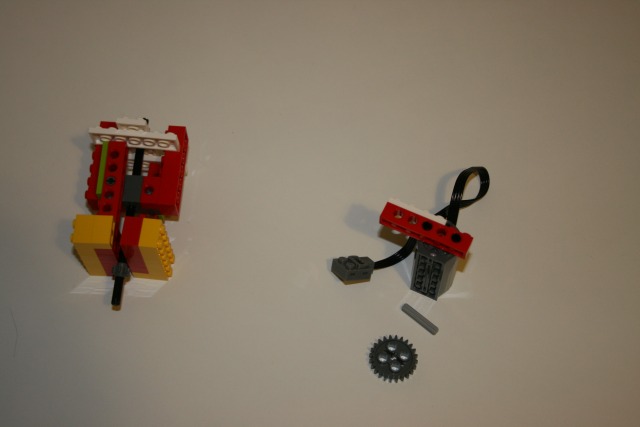
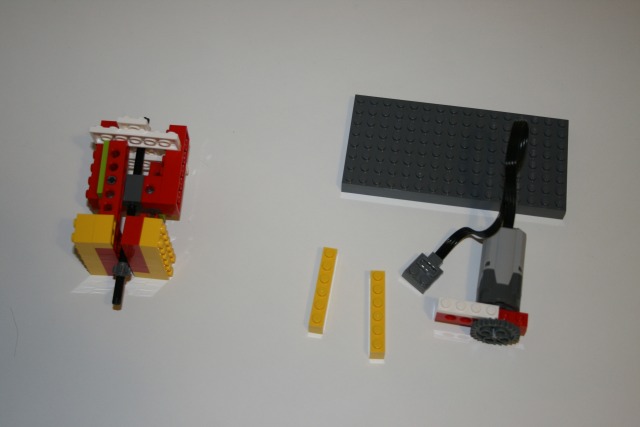
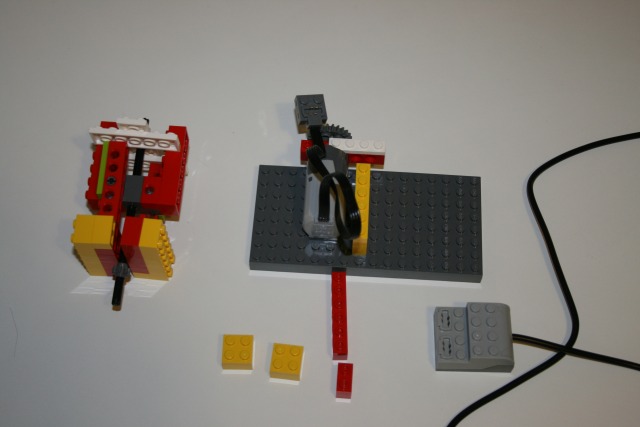
Bauanleitung
 |
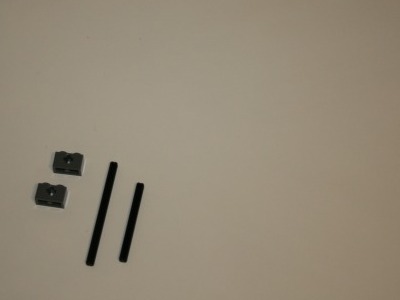
Stückliste Links das benötigte Baumaterial für den Fliehkraftregler. Alle Teile befinden sich im WeDo-Kit. |
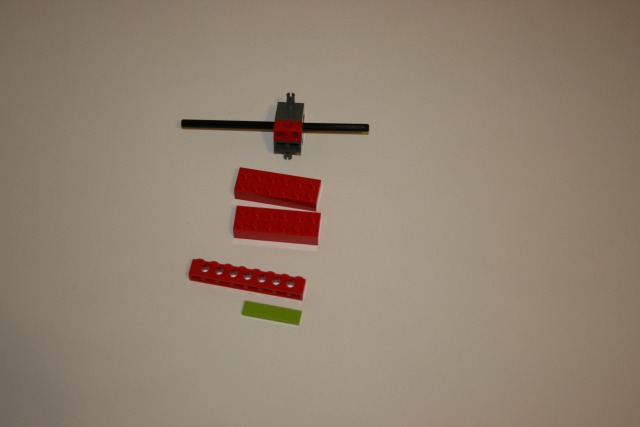
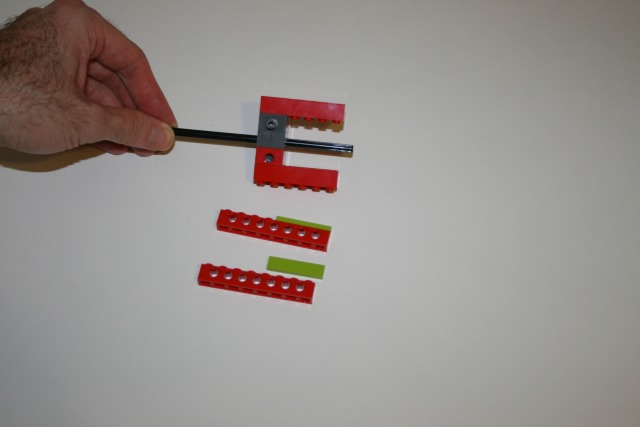
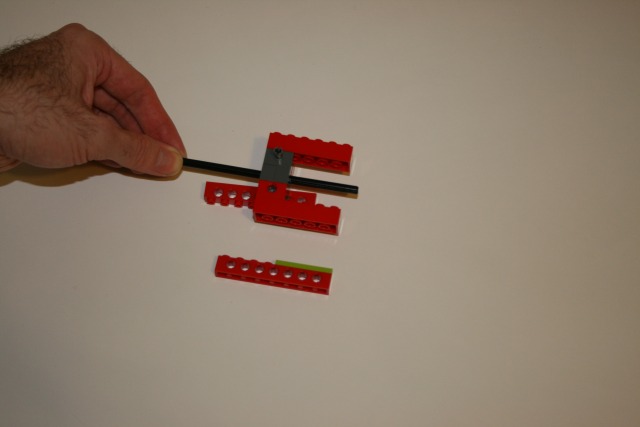
Fliehkraftregler
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|